| CSC 161 | Grinnell College | Spring, 2012 |
| Imperative Problem Solving and Data Structures | ||
Sensors for the Scribbler 2 Robot
A Scribbler 2 robot has numerous sensors for detecting the world, and the MyroC library provides function calls to obtain data from the sensors.
The following figures indicate which functions reference which sensors.
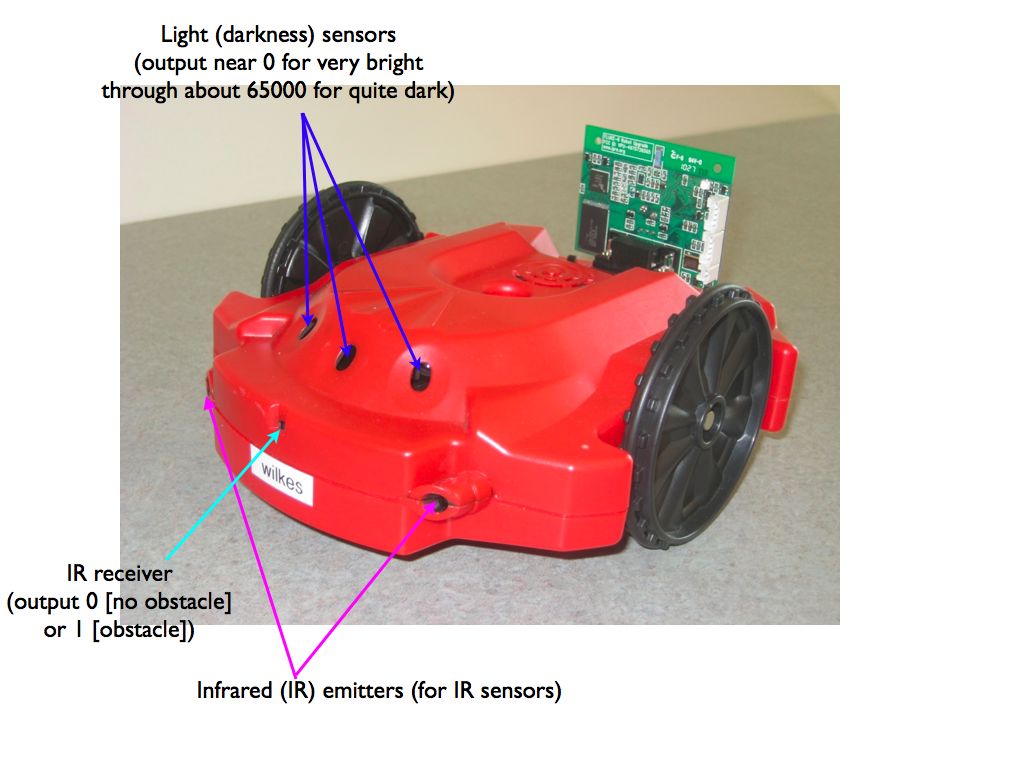
Scribbler forward
| Sensor Set | Vector Function | Text Functions | Number Functions | Values Returned | Comments |
|---|---|---|---|---|---|
| Light Sensors (really darkness sensors) | int vals[3] rGetLightAll(vals); | rGetLightTxt("left"); rGetLightTxt("middle"); rGetLightTxt("right"); | rGetLightNum(0); rGetLightNum(1); rGetLightNum(2); | bright light returns values near 0; dark areas return large integers (about 65,000) | bright, direct light needed for small-value results |
| IR Scribbler Sensors | int vals[2] rGetIRAll(vals); | rGetIRTxt("left"); rGetIRTxt("right"); | rGetIRNum(0); rGetIRNum(1); | output 0 indicates no obstacle; output 1 indicates obstacle | light must reflect from emitter to receiver, so obstacle must be a 4-6 inches away |
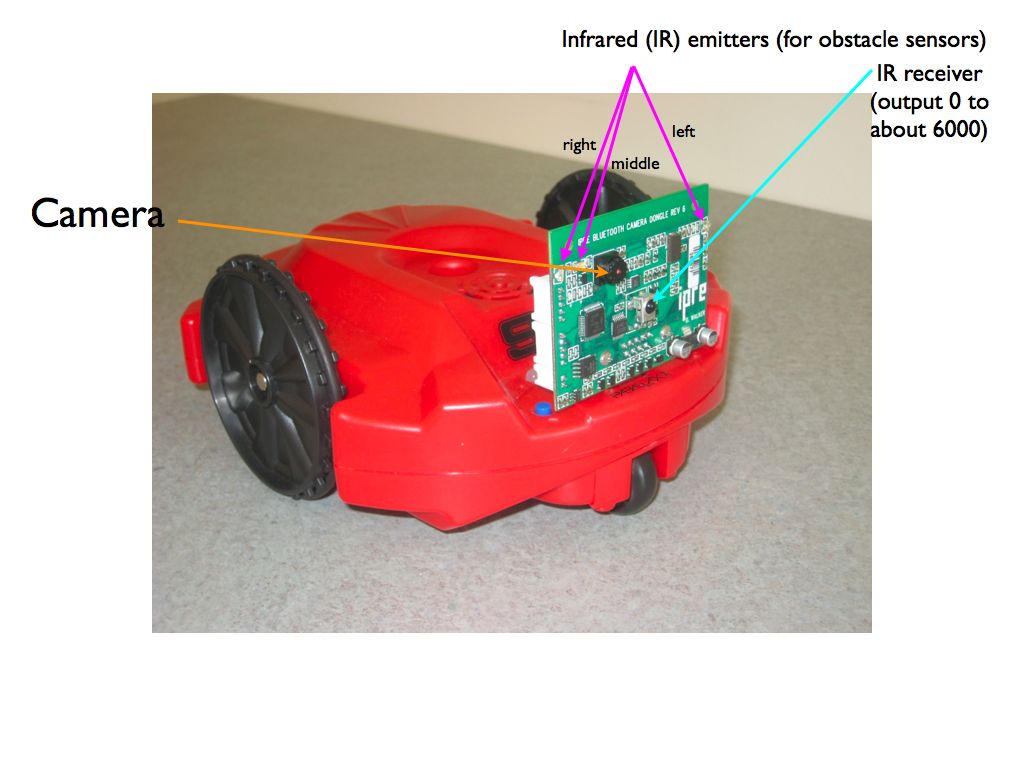
Fluke forward
| Sensor Set | Vector Function | Text Functions | Number Functions | Values Returned | Comments |
|---|---|---|---|---|---|
| Obstacle Sensors | int vals[3] rGetObstacleAll(vals); | rGetObstacleTxt("left"); rGetObstacleTxt("middle"); rGetObstacleTxt("right"); | rGetObstacleNum(0); rGetObstacleNum(1); rGetObstacleNum(2); | 0 indicates no obstacle (no light reflected from emitters) large integers (about 6,000) indicates obstacle | value returned depends upon battery strength and output; level of emitters (set by rSetIRPower(level), where level in range 0, 255) |
This document is available on the World Wide Web as
http://www.walker.cs.grinnell.edu/courses/161.sp12/scribbler2-sensors.shtml
|
created created 19 March 2012 by Henry M. Walker last revised 25 March 2012 by Henry M. Walker |
|
| For more information, please contact Henry M. Walker at walker@cs.grinnell.edu. |